基于机器人技术的飞行员服装功耗测试系统yd20614
隋修武 ,吕焕然 ,李瑶 ,万凯新 1、天津工业大学,天津300387;2.天津工业大学天津市现代机电装备技术重点实验室,天津300387
收稿日期:2016-10-17
基金项目:天津市科技特派员项目(15JCTPJC56800)
作者简介:隋修武(1971- ),男,吉林公主岭人,副教授。
原载:山东纺织科技2017/1;9-12
【摘要】文章为了分析及表征服装耗能,为飞行员装备优化设计、提供重要的科学依据,在分析人体正常步态的基础上,研制了服装功耗测试系统。系统由三部分组成,运动机构利用偏心轮摆杆机构实现人体运动时上下肢状态的模拟,头部前后摆动通过直流调速电机带动系统运动机构实现三个自由度特定运动,测试模块用PCI2300数据采集卡采集电枢电流和电压,利用空载和负载状态下累计功差值表示服装耗能。实验结果证明该系统能有效测量服装耗能。
【关键词】机器人;服装耗能;步态;测试系统
【中图分类号】TP242.6 文献标识码:A 文章编号:1009-3028(2O17)01-0009-04
1 前言
飞行员是装备系统的载体,在执行任务的过程中将时刻对其装备系统做大量无用功,主要体现在克服系统的重力做功、克服系统的内部摩擦做功、克服意外冲击震动做功、克服系统力学形变(例如服装材料的拉伸、弯曲、扭转等)做功等。飞行员贴身穿戴的个体防护装备系统包括服装、头盔等,是确保飞行员能够顺利完成任务和保证人身安全的重要保障。如何对飞行员装备系统进行综合评价,从而能够客观全面地反映减重情况、舒适性、体能消耗情况等就成了一个亟待解决的重要科学问题。服装的压力、热湿舒适性等一直是研究人员们关注的重点[1-2],但关于飞行员装备耗能的测量和评价手段还很少。
本文基于人体行走时腿部运动特征,研发了模拟人体行走运动状态的服装耗能测试系统[3-4],系统采用比较空载和负载时电流累计功差值计算服装耗能,为评价裤装耗能提供了测试手段和方法。在深入分析人体运动步态的基础上,研制了基于机器人技术的上下肢和头部三自由度服装功耗测试系统。
2 系统工作原理
由于类人机器人是机器人领域研究的热点、难点,在运动的协调性和稳定性上需要进行很多工作,所以很难得到理想的服装耗能测试机器人,因此,系统选择与人体生理外形十分接近的服装模特模型,将其覆盖在耗能测试系统外,使其能按特定的实验要求完成行走状态的模拟。为了更直接完成实验目的,本文的测试系统主要是用于腰臀部固定时运行系统,实现腿部和手臂的交替摆动,头部前后摆动,做到运动参数可测、可控。本测试系统采用调速电机驱动运动机构。由于直流电动机的转化效率很高,直流电机输出的机械能可全部消耗在系统的传动机构和模特机器人的四肢运动上。改变模特机器人的服装,就相当于在小范围内改变电动机的负载,在试验期间保持其它条件不变的情况下,小范围内的负载变化,传动系统的耗能基本保持不变,直流电机的耗能也不变,因此,只要测量出电源输送给电动机的总输入功率的变化,通过适当计算,可以得到由更换服装引起耗能数值的变化。
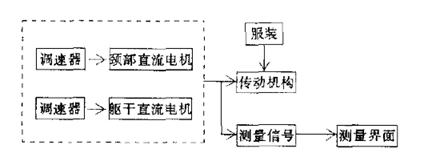
测试系统由运动机构、控制模块和测量模块部分组成,系统整体结构如图1所示。运动部分由两部分组成,直流电机带动模特机器人四肢做前后摆动,颈部直流电机控制机器人头部前后小幅度摆动,从而模拟人体行走状态;控制部分功能为对运动部分进行控制、速度的调节;采集部分的功能为在系统运转时对电流、电压的采集和瞬时功率及累计功率的计算。
|
|
|
图1 系统总体结构图 |
3 系统组成部分
3.1 运动机构
3.1.1 运动步态确定
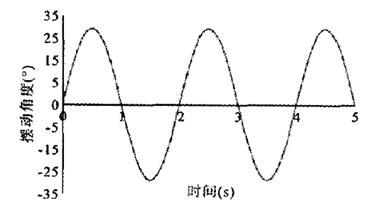
用高速摄像机拍摄人体运动步态,高速摄像机具有分辨率为1280×1024,1000 FPS的高性能,能实现复杂的触发和同步功能。选取手臂与腿部摆动至最大角度的那一帧图片,通过使用图像处理软件测量手臂和腿部摆动的角度,作为机器人最大摆动角的参考,如图2所示,根据平均值取摆杆3与AC的夹角约为25°,如图4所示,可知摆杆3的运动范围为-25°~ 25°(顺时针为正),频率为60次/min。手臂摆杆机构的原理与此相同,且手臂摆动角度为一30°~30°。而手臂与腿部摆角与时间的关系近似成一条正弦曲线,如图3所示。
|
|
|
图2 人体运动步态及四肢摆动角度测量图 |
|
|
|
图3 手臂摆角与时间关系曲线 |
3.1.2 运动结构设计
系统的运动机构采用服装模特模拟人体,并按照人体尺寸将模特的四肢连接处及头部与颈部的连接处锯成曲面状态,将分离后的腿部连接在系统腿部的摆杆d上,将分离后的手臂连接在系统手臂的摆杆e上,将分离后的头部连接在f上,运动机构的结构如图4(a)所示。
摆杆机构的工作原理是通过直流电机带动两侧的圆盘按照一定的速度转动,在圆盘上装有一突出的圆柱体,圆柱体可以在长方体摆杆的凹槽里来回滑动,并带动摆杆前后做变角速度运动,同时,通过传送带将力传导到手臂摆杆机构上,带动手臂摆杆与腿部摆杆协同摆动。其中一个摆杆机构可以简化为1个滑块和2个摆杆,如图4(b)所示。头部通过在颈部安装的电机实现前后小幅度摆动。在实际情况下,以腿部摆杆机构为例,滑块2在摆杆3上长为90 mm 的长方形槽里运动,限于滑块2的行程,摆杆3在4(b)所示平面内左右摆动,极限位置在AB与BC成90°处。
|
|
|
(a)实物图 (b)简化图 图4 摆杆机构实物图和简化图 |
|
注:(1)a-直流电动机;b-圆盘,直径为100 mm;c圆盘上突起的圆柱,距离圆心30 mm;d-长方体摆杆,总长为260 mm (2)简化图和实物对照图:滑块2-c;摆杆1-圆盘b;杆3-长方体摆杆d的滑槽,其中 Lab=30 mm,Lbc=70 mm。 |

3.2 控制模块
直流电机通过传动机构,带动腿部和手臂摆杆按一定的规律摆动,通过电机调速器可以改变直流电机的运转速度,就可以改变模特机器人双腿、手臂的摆动速度,及头部前后摆动速度。根据直流电机的机械特性公式:

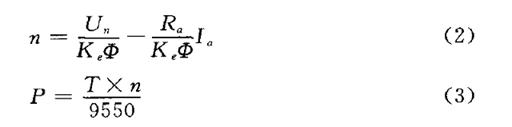
式中T为电磁转矩,Kt 为转矩常数,Ke 为电动势常数,n为电动机转速,P为电动机效率。
如果忽略电枢反应的影响,转矩T与Ia成正比,当 Ia增加时,转速n要下降,因Ra较小,转速n下降得不多,改变机器人穿着的服装相当于在小范围内改变负载,电动机效率P基本不变,因此只要计算出电源输送给电动机总功率的变化,通过适当运算即可得到服装耗能的变化。
直流脉冲调速电路由主驱动电路、三角波发生器、电压一脉冲变换器、脉冲分配与功率放大四部分组成。通过图(3)曲线给定电压Uk,给定电压Uk,和三角波电压U2一起加在电压一脉冲变换器的反相输入端。
3.3 采集模块
PCI 2300数据采集卡,具有100 kHz的12位A/D转换器,输入信号范围为±5 V、±10 V、0~10 V。由于电机电枢电压为PWM 波,幅值为24V,因此不能直接进入PCI数据采集卡进行测量,将测量电路进行放大和滤波,将24 V 的的PWM波调整成0~10 V 的直流电压信号。而电枢电流的测量采用在电枢电路串联大功率小阻值精密测量电阻器,阻值为0.1 V,由于阻值较小,不会引起大的压降,将其放大成0~10 V 的直流电压信号进行测量。
4 实验
飞行员服装前部为拉链开口,腰部与袖口有搭伴式松紧带,裤脚底部有拉链。衣服上共有8个用拉链开合的口袋,胸部两个,大腿前两个,小腿前两个,左臂1个,左大腿内侧1个[5-7 ],分别用两种不同的材料制作测试服装[8]。
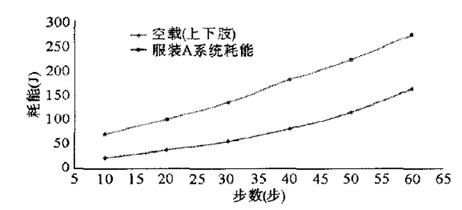
实验一为上下肢运动服装耗能实验,测量计算上下肢空载运动及穿着服装后的耗能数值,将所得实验结果制作成曲线,如图5所示。
由图5可知,在保持头部不运动的情况下,穿着服装前后,系统的耗能发生了明显变化,且保持线性关系,可知系统上下肢运动时可以准确测量服装耗能的多少。
|
|
|
图5 上下肢空载运动及穿着服装耗能曲线 |
实验二为头部及上下肢运动服装耗能实验,测量计算头部及上下肢三个自由度同时运动时空载及穿着服装的耗能数值,将所得结果制作成曲线,如图6所示。
|
|
|
图6 三自由度同时运动空载及穿着服装耗能曲线 |
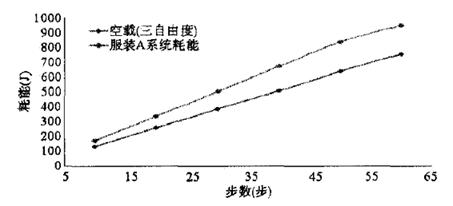
根据图6所得结果,可知头部及上下肢三自由度同时运动时,在穿着相同服装的情况下,系统的耗能在穿着服装前后发生很大变化,且依然保持线性关系,所以系统三自由度同时运动时,可以准确测量服装的耗能多少。
实验三为三自由度同时运动服装耗能实验,测量计算系统在三个自由度同时运动时,穿着不同服装的耗能情况,分别记录系统在空载、穿着服装A、穿着服装B、穿着服装C的耗能数值,并制作成曲线,如图7所示。
|
|
|
图7 三自由度同时运动空载及穿着服装A和服装B曲线 |
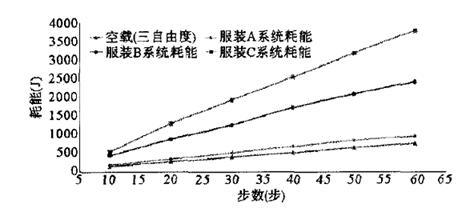
从图7结果中可知,在相同的运动速度和步数下,穿着不同的服装,耗能情况也不同,服装B的耗能明显多于服装A的耗能。
5 结论
本文依照人体行走的特点研发出了基于机器人技术的服装功耗测试系统,搭建的实验平台可以完成上下肢和头部三个自由度分别运动的情况下测试服装耗能,为耗能测试提供了测试与评价的方法。
通过进一步实验,改变服装的面料、尺码、剪裁方式等,分析耗能与其之间的关系,为飞行员装备系统的优化设计提供科学依据。
参考文献:
[1] Doan BK,Kwon YH,Newton RU,et a1.Evaluation of A Lower-Body Compression Garment[J].Journal of Sports Robot Technology Based System for Sciences,2003,21(8);601-610.
[2]Rob Duffield,Marc Portus.Comparison of Three Types of Full-Body Compression Garments on Throwing and Repeat-Sprint Performance in Cricket Players[J].Journal of Sports M edicine,2007,(41);409-414.
[3]隋修武,牛雪娟,姜亚明,等.模特腿部运动的服装耗能测量系统[J].传感器与微系统,2010,(5);96-98,101.
[4]黄丽,姜亚明,隋修武.基于正常步态裤装耗能测试系统的研制[J].纺织学报,2010,(11);131-134.
[5]张荣.飞行员防护服面料性能及特点[J].产业用纺织品,2004,22(11);18-20.
[7]蒋毅,路曦,祖媛嫒.个体防护装备创新研制探析[J].中国个体防护装备,2014,(1);6-7.
[8]陈益松,白刚,严伟明.工业机器人防护装的设计与开发[J].上海纺织科技,2o15,43(1);44-45.
[9]贺良震,陈志华.面料触感舒适度测试装置的设计[J].纺织器材,2013,40(3);58-60.